About the Project
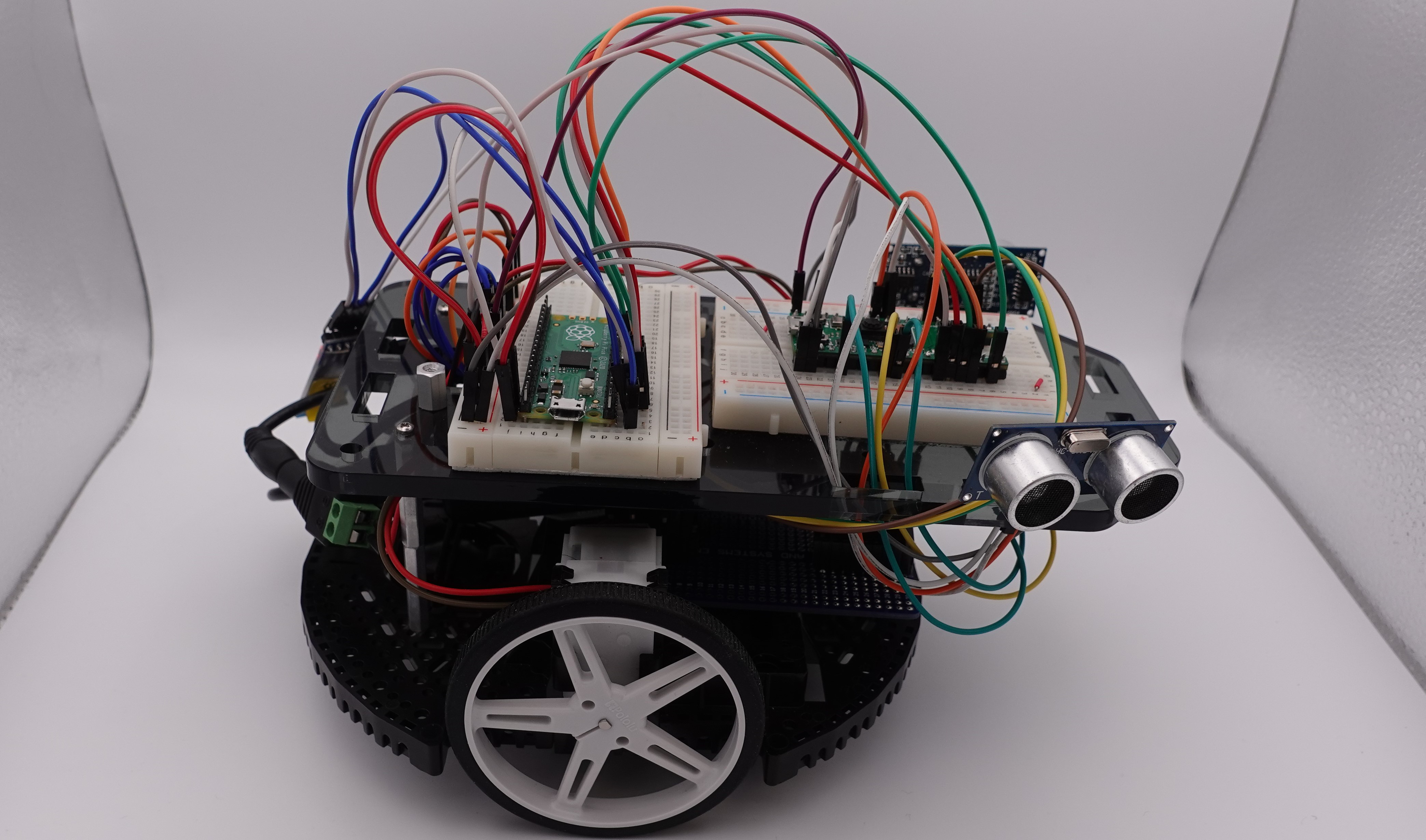
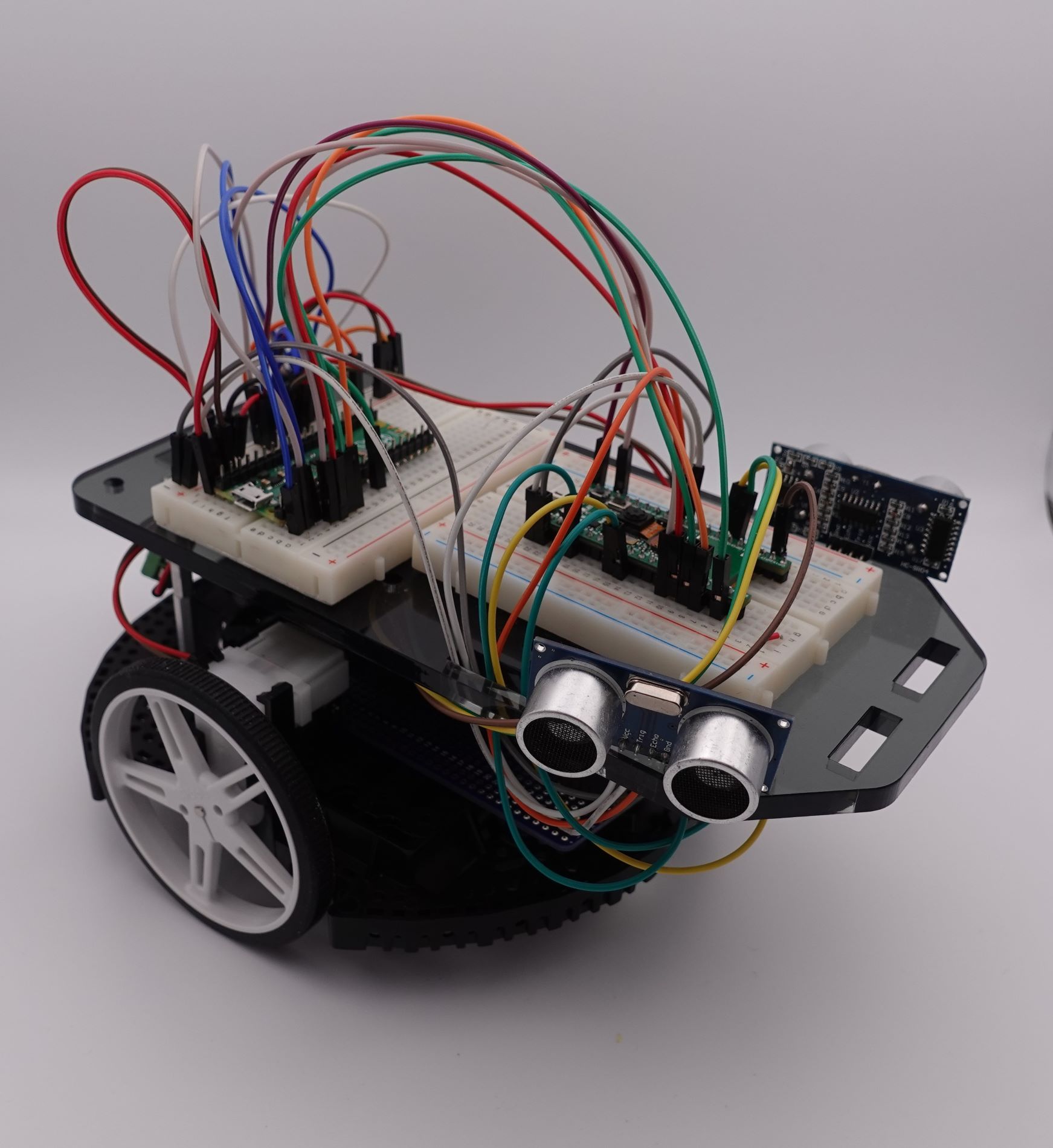
This project was focused initially to serve as a prototype to aid the physically challenged through a voice recognition model. The tiny RC car mimics/represents a system that could provide movement for the disabled through the use of simple commands such as start/stop vehicle. The control of the direction could be implemented using advanced ML features such as eye tracking, object tracing or through joysticks that could be actuated from other parts of human body such as jaw movement. The tiny RC car gives a minimalistic feel as to how this could be implemented so that it could be expanded further in the future. Feel free to get in touch to learn more or to work together! ;)
Go to Projects